


W porównaniu z teorią prądu stałego, która była przedmiotem rozważań w poprzednich numerach I&UR, zagadnienie teorii prądu przemiennego jest bardziej skomplikowane. Prąd stały ma jeden stały kierunek przepływu, stąd zresztą jego nazwa. Prąd przemienny charakteryzuje się cykliczną zmiennością kierunku przepływu w takt zmian polaryzacji napięcia w przewodach obwodu elektrycznego.
Dlaczego prąd przemienny?
Jest kilka oczywistych zalet prądu przemiennego, a pierwszą z nich jest przesyłanie energii. Prąd przemienny pozwala na kształtowanie swojego napięcia w bardzo szerokim zakresie. Jeśli zatem podniesiemy napięcie prądu przemiennego do wysokiego poziomu, to przy tej samej mocy będziemy mieli bardzo małe prądy (ściślej: natężenia prądu). Przy przesyłaniu energii elektrycznej na duże odległości, wysokie napięcie jest czynnikiem decydującym o bardzo niskich stratach.
Strata energii podczas przesyłania jest proporcjonalna do kwadratu wartości natężenia prądu, co oznacza, że jeśli przesyłamy energię przy 10 razy większym natężeniu, straty będą 100 razy większe. Ilość możliwej do wykonania pracy jest prawie równa ilości dostarczonej energii (różnica wynika ze sprawności).
Tę samą ilość pracy można wykonać, pracując przy wysokim napięciu i małym natężeniu prądu albo przy niskim napięciu, a wysokim natężeniu prądu, ponieważ energia elektryczna, a zatem i zdolność do wykonania pracy, wynika z iloczynu wartości napięcia i natężenia prądu. Oznacza to, że mając określone źródło dające energię elektryczną w stałej wielkości, zwiększając jeden parametr, automatycznie w tym samym stopniu zmniejszamy drugi parametr. Nie zmieniamy bowiem wartości energii. Prąd przemienny ma tę cenną zaletę, że łatwo można zmieniać jego napięcie w transformatorze do wielu tysięcy woltów i przesyłać liniami energetycznymi przy względnie małym natężeniu prądu. Umieszczony na drugim końcu linii transformator ponownie zmienia napięcie do poziomu wymaganego przez odbiorców energii. Napięcie prądu przemiennego zmieniane jest łatwo od napięć niskich (np. ładowanie akumulatora przy 12 V) do wartości średnich powszechnego użytku, a nawet w silnikach dla przemysłu.
Cechy charakterystyczne prądu przemiennego
Typowym obrazem prądu przemiennego jest sinusoidalna fala, przesuwająca się wzdłuż osi czasu tak samo dla napięcia, jak i dla natężenia (rys. 1). Taki obraz można uzyskać na ekranie oscyloskopu. Na tym ekranie amplituda napięcia jest odwzorowaniem pionowego wychylenia się promienia rysującego fale, natomiast poziome przesunięcie reprezentuje czas. Na tym obrazie pole, na którym linia zmian wartości napięcia jest ponad poziomą osią, oznacza napięcie dodatnie i jeden kierunek przepływu prądu. Odpowiednio, pole, na którym wartości napięcia znajdują się pod tą linią, oznacza napięcie ujemne i przeciwny do poprzedniego kierunek przepływu prądu w przewodzie. Jednym słowem, aby można było mówić o prądzie przemiennym, musi istnieć poziom napięcia odniesienia równy 0 V, zaś napięcie prądu musi się zmieniać z dodatniego na ujemne i z powrotem. W ślad za zmianą napięcia z dodatniego na ujemne i z powrotem, będzie szła zmiana kierunku przepływu prądu, mamy zatem do czynienia jakby z pulsującym tam i z powrotem prądem stałym. Przy tym zmiany wartości natężenia prądu mają identyczny kształt na wykresie (czy na ekranie oscyloskopu) jak zmiany napięcia.
Pozioma oś na wykresie przebiegu napięcia i prądu, choć obrazuje upływ czasu, to jednak najczęściej jest skalowana w stopniach miary kąta. Każdy cykl zmiany zaczynający się od zerowej wartości i rosnącej do maksimum, a następnie malejący aż do przejścia w wartości ujemne (przecina oś czasu) i ponownie po osiągnięciu minimum dochodzący do zera (czyli do punktu startu następnego cyklu), określamy jako kąt pełny 360 stopni.
Dzieląc ten kąt 360o zaznaczamy charakterystyczne punkty przebiegu zmian napięcia i prądu (rys. 2). Wyróżniamy przede wszystkim: początek fali 0 V (przy 0o), maksimum wartości (przy 90o), spadek do zera woltów (przy 180o), punkt minimalnej wartości (przy 270o) i koniec cyklu, czyli 0 V przy 360o (czas trwania jednego pełnego cyklu powtarzających się zmian wartości parametru prądu nazywamy okresem fali. Mierzymy go w sekundach lub jednostkach pochodnych (ms, µs). Ponieważ czasem cyklu z reguły są maleńkie ułamki sekundy, w praktyce używane jest określenie, mówiące o tym, ile cykli mieści się w jednej sekundzie. Jest to tak zwana częstotliwość (w użyciu jest też termin „częstość”), a jej miarą jest Hertz (symbol: Hz), czyli jeden cykl na sekundę. Nazwa tej jednostki wywodzi się od nazwiska niemieckiego uczonego Rudolfa Hertza.
Więcej szczegółów o napięciu
Napięcie w każdym punkcie sinusoidy jest napięciem chwilowym. Napięcie chwilowe w najwyższym punkcie dodatnim (punkt maksimum) jest wartością szczytową napięcia, natomiast różnica pomiędzy najwyższym punktem dodatnim a najniższym punktem ujemnym (punkt minimum) jest napięciem międzyszczytowym. W sinusoidalnym przebiegu napięcia prądu przemiennego międzyszczytowa wartość napięcia jest dwukrotną wartością napięcia szczytowego. Wartości te są ważne przy rozważaniu parametrów izolacji, ponieważ izolacja musi wytrzymywać te napięcia szczytowe. Napięcie prądu przemiennego 220 V, jakie mamy w swoich domach, ma wartość międzyszczytową około 620 V. Skąd zatem bierze się wartość 220 V jako najczęściej wymieniana? Jest to wartość średnia kwadratowa napięcia prądu przemiennego (nazywana jest wartością skuteczną prądu przemiennego (ang. skrót RMS) o sinusoidalnym kształcie fali i wartości szczytowej napięcia zbliżonej do 310 V.
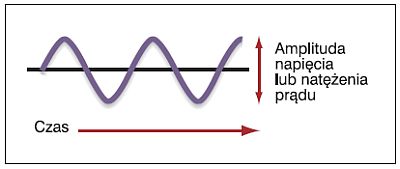 Rys. 1. Wykresy fal sinusoidalnych napięcia lub natężenia prądu przedstawione jako sinusoidy liniowe w funkcji czasu
Rys. 1. Wykresy fal sinusoidalnych napięcia lub natężenia prądu przedstawione jako sinusoidy liniowe w funkcji czasu
Wartość skuteczna prądu przemiennego reprezentuje w pewnym sensie stan ustalony szybko zmieniającego się napięcia prądu przemiennego. Wartość skuteczna jest pierwiastkiem drugiego stopnia średniej kwadratów wszystkich chwilowych wartości napięć w całej fali.
Ta wartość skuteczna napięcia prądu przemiennego o fali sinusoidalnej jest także równoważna napięciu prądu stałego. Prąd przemienny o fali sinusoidalnej i napięciu, którego wartość szczytowa wynosi 170 V może wykonać taką samą pracę jak prąd stały o napięciu 120 V. Dla tych, którym potrzebne są liczby, wartość skuteczna jest równa wartości szczytowej podzielonej przez liczbę 1,414, która w przybliżeniu odpowiada wartości pierwiastka drugiego stopnia z 2. Rozwijając dalej, otrzymuje się następujące wzory:
Wartość szczytowa = wartość skuteczna (RMS) x 1,414
Wartość średnia = wartość szczytowa x 0,637
Wartość skuteczna (RMS) = wartość szczytowa x 0,707
Powyższe wzory są oparte na teoretycznym kształcie fali sinusoidalnej.
Napięcie prądu przemiennego nie zawsze ma kształt fali sinusoidalnej. Sygnał napięcia prądu przemiennego może być nałożony na napięcie prądu stałego co nazywane jest przesunięciem. Jeżeli napięcie prądu stałego jest wyższe niż wartość szczytowa napięcia prądu przemiennego, to w takim połączeniu nigdy nie pojawi się wartość ujemna napięcia. Napięcie o takim przebiegu nazywane jest napięciem pulsującym prądu stałego. Często, zazwyczaj z powodu wadliwego uziemienia, dwa sygnały napięciowe prądu przemiennego są na różnych poziomach, prezentując napięcie w odniesieniu do swoich uziemień – czasami przy poziomach niebezpiecznych dla życia.
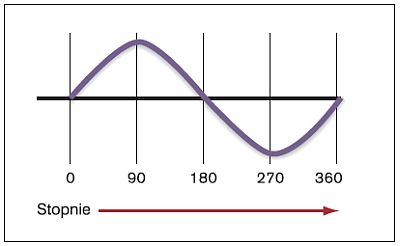 Rys. 2. Jeden cykl lub okres fali prądu przemiennego może być podzielony w przedziale 360 stopni
Rys. 2. Jeden cykl lub okres fali prądu przemiennego może być podzielony w przedziale 360 stopni
Fale o różnych kształtach
Generatory wytwarzają prąd elektryczny, którego fale mają kształt sinusoidy. Jednak zarówno w teorii, jak i praktycznych zastosowaniach elektryczności i elektroniki nie wszystkie fale elektryczne mają kształt sinusoidalny (rys. 3).
Fale o kształcie prostokątnym przedstawiają dane w komputerze. W fali o kształcie prostokątnym napięcie rośnie do pewnej wartości niemal natychmiastowo, aby po pewnym czasie powrócić do zera. Podobnie jak przy falach sinusoidalnych, jeżeli fale prostokątne przemiennie osiągają dodatnie i ujemne wartości napięcia, mówimy, że jest to prąd przemienny, chociaż kształt fali nie jest sinusoidalny. Jeżeli taki prąd nigdy nie zmienia polaryzacji, mówimy, że jest to pulsujący prąd stały.
W fali o kształcie piłokształtnym wartość napięcia powoli rośnie do wartości szczytowej, a potem gwałtownie opada do wartości początkowej. Ten rodzaj fali steruje wiązką elektronów w kineskopie TV i oscyloskopie. Oczywiście pewne zniekształcenia mogą zmieniać kształt każdej fali i tym samym zachowanie się sygnału.
Moc prądu przemiennego
W obwodach prądu przemiennego moc jest mierzona zdolnością napięcia i natężenia do wykonania wymiernej pracy i jest wyrażana w watach, kilowatach i megawatach. W przypadku czystego obciążenia rezystancyjnego moc jest zwyczajnie wynikiem działania napięcia i natężenia bez wzgędu na polaryzację. Matematycznie ujmując, aby otrzymać wartość mocy wykorzystywanej w obwodzie, należy pomnożyć wartości napięcia i natężenia.
Ważnym szczegółem jest to, że moc, która wykonuje pracę, pochodzi z ruchu elektronów bez względu na to, w jakim kierunku się one poruszają. Wartość skuteczna prądu przemiennego z falą sinusoidalną jest niezależna od polaryzacji chwilowej – jest to wartość bezwzględna napięcia i natężenia, a nie wartość średnia. Wartością średnią napięcia (lub natężenia) prądu przemiennego z falą sinusoidalną jest zero.
Kąt fazowy jest znamiennym kątem sygnału w przedziale od 0 do 360. Kąt fazowy musi być jeszcze do czegoś odniesiony. Zazwyczaj kształt fali natężenia prądu do jego napięcia lub innego napięcia (rys. 4).
Przesunięcia fazowe w obwodach prądu przemiennego mogą sprawiać, że twornik silnika nieustannie próbuje dogonić pole magnetyczne, tak jak to jest w przypadku zasilania trójfazowego, powszechnie stosowanego w zakładach przemysłowych. W tym samym czasie kąty fazowe pomiędzy napięciem i natężeniem w tym samym silniku mogą powodować stratę mocy i przekroczenie zapotrzebowania, jakie zgłoszono do rozdzielni mocy, za co w konsekwencji elektrownia może nałożyć karę.
Napięcie przyłożone do obciążenia czysto rezystancyjnego i natężenie prądu płynącego przez ten rezystor są zawsze zgodne w fazie. Obciążenie indukcyjne, jakie powodują silniki indukcyjne lub oświetlenie, wywołuje przesunięcie w fazie względem siebie napięcia i natężenia. W przypadku czystego indukcyjnego obciążenia (przypadek teoretyczny) fala natężenia prądu będzie opóźniona w fazie w stosunku do fali napięcia o 90 stopni, ale w rzeczywistych warunkach będzie to opóźnienie mieszczące się w zakresie pomiędzy 0 a 90 stopniami.
Z takim rodzajem obciążenia związane są dwie składowe zużywanej mocy. Pierwszą z nich jest moc czynna (składowa stała), która wykonuje pracę i działa jak moc w obwodzie z obciążeniem rezystancyjnym, bowiem natężenie prądu i napięcie są zgodne w fazie. Drugą jest moc bierna (składowa zmienna), która powoduje powstawanie w silniku pola magnetycznego, umożliwiając jego działanie. Suma geometryczna tych dwóch składowych jest nazywana mocą pozorną. Jednostką mocy pozornej jest woltamper (1 VA). Należy rozpatrywać sumę geometryczną (wektorów), ponieważ natężenie prądu mocy biernej jest przesunięte w fazie w stosunku do napięcia, dlatego moc bierna jest również przesunięta w fazie w stosunku do mocy czynnej. Należy pamiętać, że przesunięcie w fazie oznacza, iż te dwie składowe nie są zgodne w czasie. Stosunek mocy czynnej do mocy całkowitej lub pozornej jest współczynnikiem mocy. Jeżeli moc całkowita jest mocą czynną, ten stosunek jest jak 1:1 i współczynnik mocy jest liczbą jeden.
Obciążenie indukcyjne gromadzi energię w polu magnetycznym podczas jednej części cyklu i uwalnia ją podczas drugiej, równoważnej części tego cyklu. Licznik watogodzinowy instalowany w budynkach mierzy ilość energii czynnej zużywanej przez zainstalowane urządzenia. Moc bierna, która oscyluje między źródłem a odbiornikiem, kasuje się sama w mierniku, nie wykonuje pracy rzeczywistej i nie jest mierzona. Jednak ta moc bierna nie powraca całkowicie przewodami do źródła tj. do elektrowni. Powoduje ona straty w przewodach i transformatorach i wymaga masywniejszych podzespołów w rozdzielni (objawem tych strat jest nagrzewanie się silników i przewodów, co wskazuje, że stracona energia zamieniła się w energię cieplną). Z tego względu elektrownia albo nakłada karę za niski współczynnik mocy, albo udziela rabatu, gdy współczynnik mocy jest w pobliżu wartości jeden.
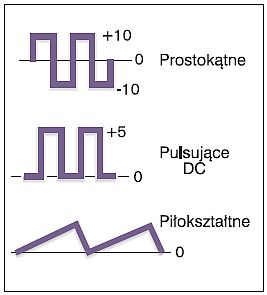 Rys. 3. Nie wszystkie fale mają kształt sinusoidalny. Na rysunku pokazana jest fala o kształcie prostokątnym, pulsująca prądu stałego i fala piłokształtna
Rys. 3. Nie wszystkie fale mają kształt sinusoidalny. Na rysunku pokazana jest fala o kształcie prostokątnym, pulsująca prądu stałego i fala piłokształtna
Kondensator również gromadzi energię podczas jednej części cyklu i uwalnia ją w dalszej fazie tego cyklu. W kondensatorze odwrotnie niż w cewce indukcyjnej, napięcie jest opóźnione w fazie w stosunku do natężenia prądu. Jeżeli kondensator jest połączony szeregowo z silnikiem indukcyjnym, to moc wykorzystana do wytworzenia pola magnetycznego jest z powrotem zbierana w kondensatorze. W drugiej połowie cyklu moc zgromadzona w kondensatorze jest uwalniana do wytworzenia pola magnetycznego w silniku. Nie jest to oczywiście jeszcze idealny obwód i zawsze występują tu straty. Właściwie dobrany kondensator zachowuje maksymalną wielkość mocy biernej w obwodzie silnik-kondensator, zamiast przesyłać ją przewodami z powrotem do elektrowni.
Niektóre zakłady umieszczają przy urządzeniach doprowadzenia energii dużą baterię kondensatorów. Celem jest dopasowanie tej baterii do skorygowania współczynnika mocy dla całości zainstalowanych urządzeń. W tym układzie urządzenie dynamicznie mierzy współczynnik mocy i automatycznie włącza i wyłącza kondensatory jako obciążenie bierne i w rezultacie zmienia się współczynnik mocy.
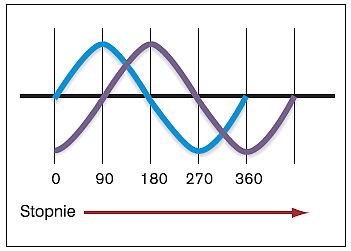 Rys. 4. Na rysunku przedstawiono fazowy wzajemny stosunek pomiędzy falami. Fala koloru purpurowego jest opóźniona w fazie o 90 stopni w stosunku do fali koloru niebieskiego, bowiem niebieska osiąga za każdym razem wartość szczytową o 90 stopni wcześniej niż purpurowa
Rys. 4. Na rysunku przedstawiono fazowy wzajemny stosunek pomiędzy falami. Fala koloru purpurowego jest opóźniona w fazie o 90 stopni w stosunku do fali koloru niebieskiego, bowiem niebieska osiąga za każdym razem wartość szczytową o 90 stopni wcześniej niż purpurowa
Są też zakłady, które instalują pojedyncze kondensatory przy każdym odbiorniku indukcyjnym z możliwością ich włączania lub wyłączania w obwód stosownie do potrzeb. Kombinacja korekcji ogólnej dla odbiorników ogólnozakładowych, jak obciążenia oświetleniem, które można potraktować jako względnie stałe, oraz pojedynczych kondensatorów dopasowanych wielkością do każdego silnika indukcyjnego, jest również dobrym rozwiązaniem. W obu przypadkach jest rzeczą niezmiernie ważną właściwe określenie wielkości baterii kondensatorów. Jeżeli będzie zbyt mała, to może nie spełnić swego zadania, by dać optymalną korekcję współczynnika mocy. Natomiast gdy bateria będzie zbyt duża, to spowoduje spadek współczynnika mocy ze względu na reaktancję pojemnościową.
Czy możemy otrzymać zbyt wiele? Oczywiście. Jeżeli korekcja współczynnika mocy usunie całkowicie reaktancję indukcyjną, to prawdopodobnie pojawią się oscylacje pomiędzy silnikiem a kondensatorem. Oscylacje te mogą wzmacniać się wzajemnie, podobnie jak odbijane fale dźwiękowe w sali audytorium. Należy bezwzględnie unikać takiego scenariusza działania, bowiem mogłoby to spowodować poważne uszkodzenia obu urządzeń. Optymalnie około 80% mocy biernej powinno być zredukowane przez korekcję współczynnika mocy. Takie działanie zapewni margines bezpieczeństwa, a w niektórych przypadkach pozwoli na zwiększenie współczynnika mocy do 0,95.
Bez względu na to, jak dobrze spełnia swoją rolę korekcja współczynnika mocy w obwodzie, to przewody, styczniki i aparatura łączeniowa pomiędzy odbiornikiem a baterią kondensatorów muszą być zaprojektowane z pewnym nadmiarem (czyli dla wyższych wartości napięcia i prądu), aby przenieść moc całkowitą – zarówno moc czynną, jak i moc bierną, które mogłyby pojawić się w którymś specjalnym obwodzie.
Artykuł pod redakcją Janusza Pieńkowskiego
Autor: Wendell S. Rice, specjalista inżynier automatyk, Parsons Infrastructure & Techn


